 赞
赞 相机画质
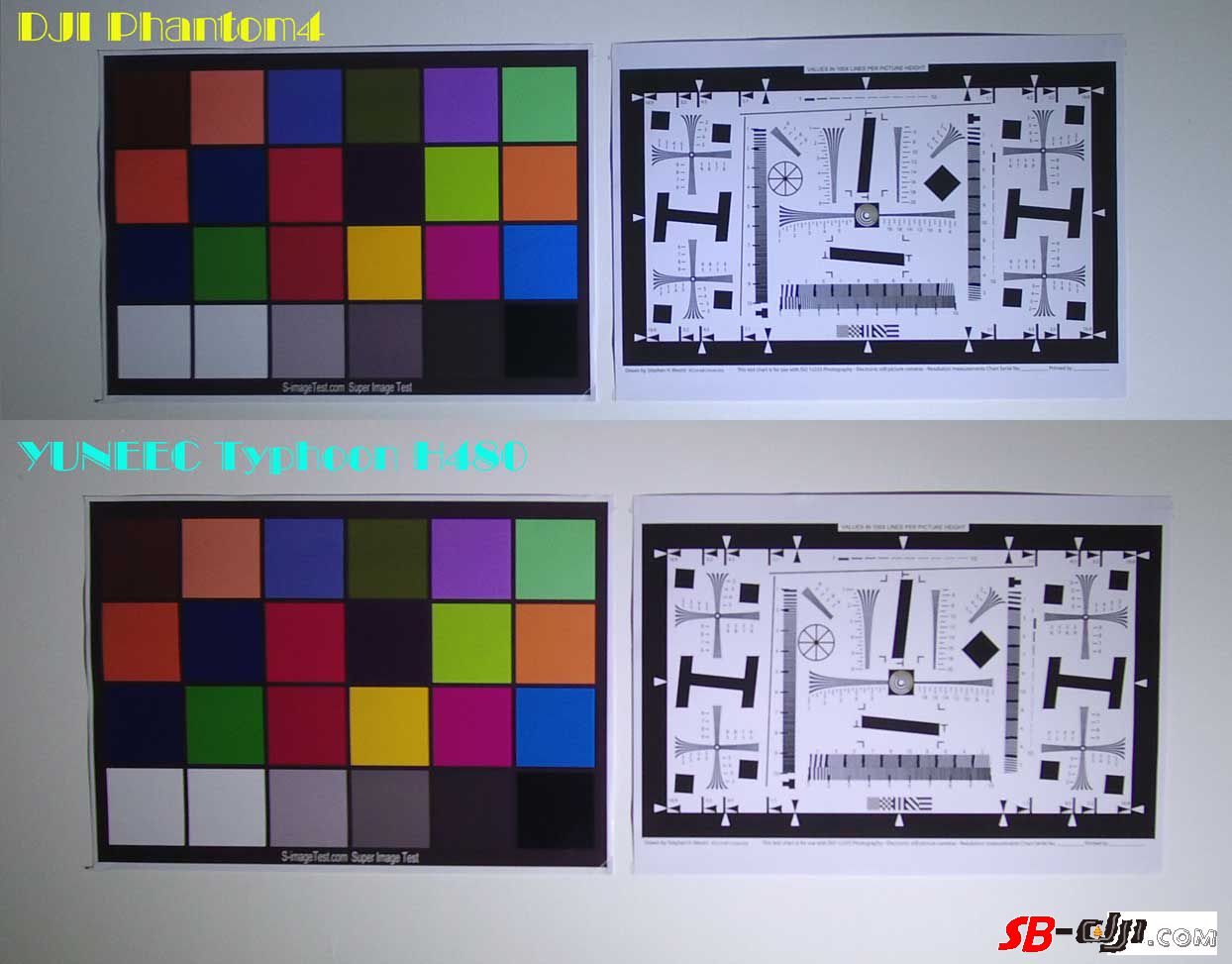
台风H480与精灵4机器都置于拍摄目标同距离,裁截自锐度最高的镜头中心成像。精灵4的白平衡和锐度更有优势。
以下是常规曝光:
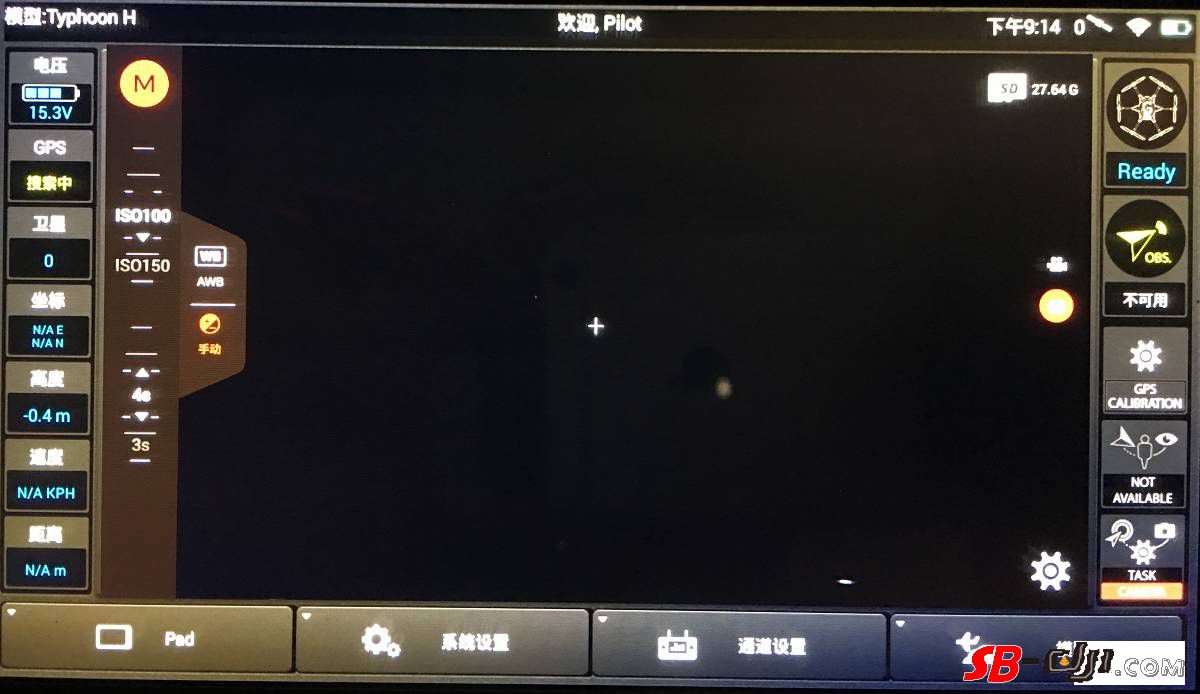
关于夜景拍摄,由于台风H480手动模式ISO 100最多只能支持到4秒,夜景只能提高ISO增加亮度,前臂LED灯也无法像精灵4一样用APP关闭,夜景能力堪忧。
更有让人无语的现象是设置曝光4秒,最后下来的照片,偶尔是20/1秒偶尔能到4秒,并不是设置什么,就按什么设置拍照,我以为这是孤例而已,结果在贴吧上也有同样的反馈。
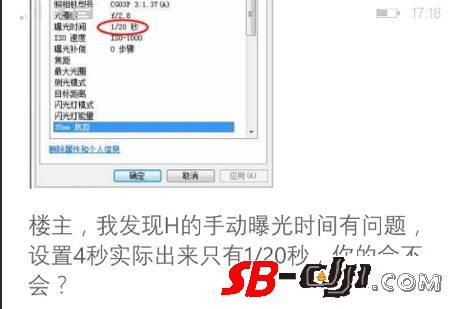
偶尔一次又是正常的

精灵4就木有这些唧唧歪歪的破事儿,什么体位都能配合。。 
室外拍照都调整为全自动模式,默认风格,最常用的JPEG格式存储。
原图

100%放大

H480原始样片请在 http://dl.sb-dji.com/YUNEEC/H480/sample/ 下载
另一点台风H480的APP不足是,无法回放、管理已拍摄的录像和照片,目前只能插拔TF卡到电脑端完成,而DJI GO可以通过APP播放和管理所有媒体。
视频
避障
先看视频:
之前网上流出台风H480侧飞避障无效,可能是早期固件BUG,在我的最新固件飞机上并没有出现。不过厂家包装中放有安全警告,要求在起降前关闭避障功能,不能默认常开,使用上略微麻烦。
台风H480 APP没有避障告警功能…
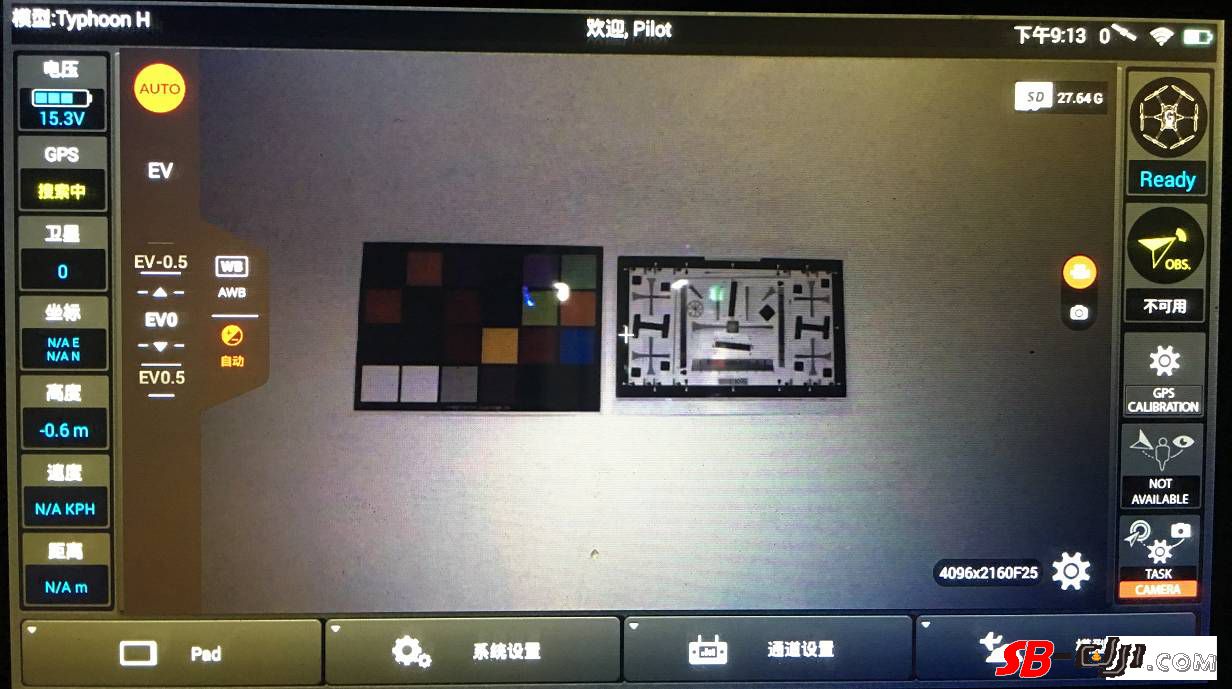
精灵4的视觉识别则更加先进,APP与飞行器实时数据进行渲染,得到了直观的雷达数据,而台风H480则欠奉。

根本处理器存在硬件代差,看来只能交出这样的成绩了。
台风H480整机处理器唯有STM32F405,比PIXHWAK的STM32F427还低一档。
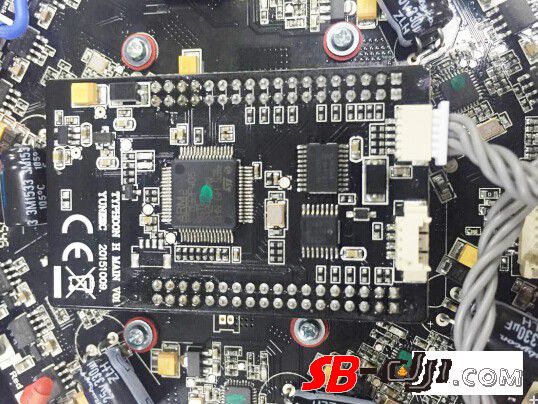
精灵4双目避障方案中使用的FPGA型号为Lattice的LCMXO3L-2100C-6BG256I,该FPGA属于Lattice的MachXO3 FPGA系列。

最后总结一下台风H480与精灵4的适用人群:
台风H480更适合目视距离作业,禁飞区少,且需要双人控制360度云台转向,不爱好拍摄夜景的非专业航模爱好者。同时遥控器按钮繁多,六轴折叠设计,外观足够唬人。台风的应用程序也可修改限飞而达到1000米高度(虽然图传很早就丢了)…总比没有强吧。 
精灵4则因为限飞区数据库庞大,北京、新疆等敏感地区模友只能远郊飞行。从软、硬件功能和性能上比较,精灵4近乎完胜台风H480,且加上更加便携的体积,适合几乎适用所有人群。
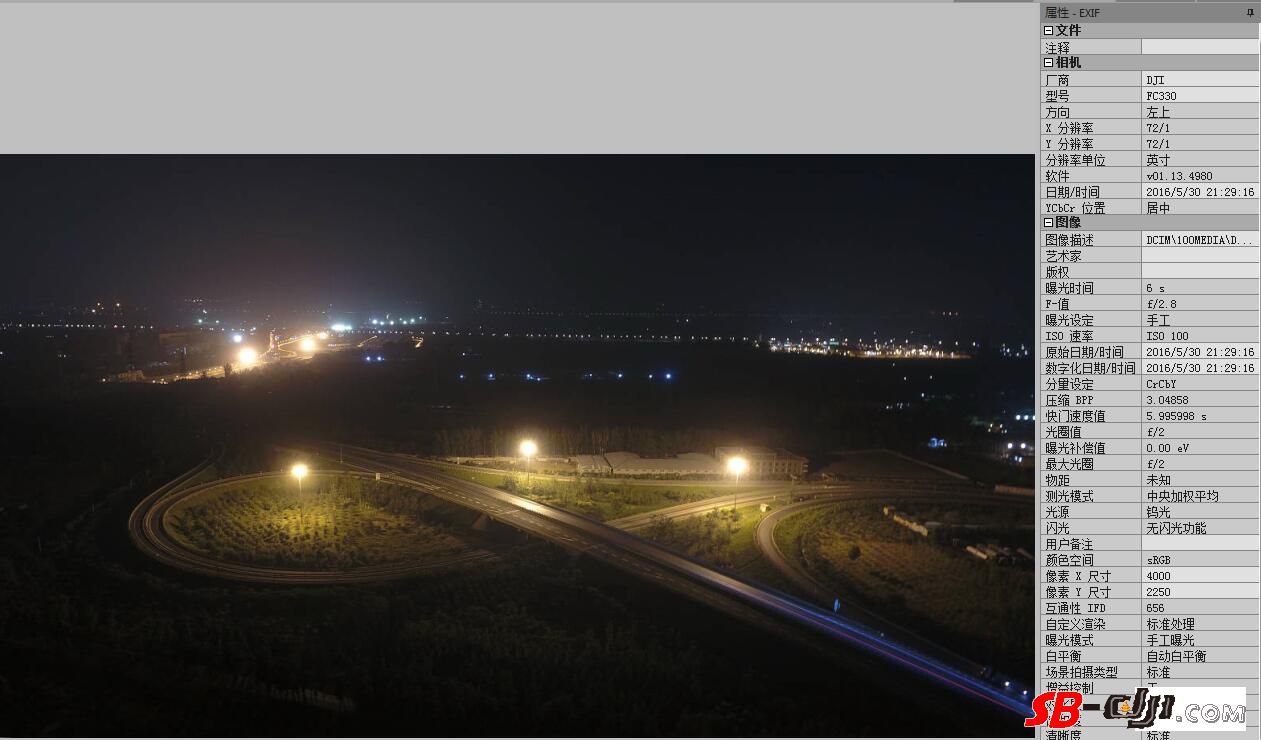
不管你是专业飞手能根据姿态球判断风力规划作业范围,还是菜鸟傻傻分不清楚飞出去多远应该回来(智能电池可计算剩余电量可达距离并提示返航),DJI GO这个异常强大的APP都能交出满意答案。夜拍人士对于更高的成像锐度,及为夜景长曝光考虑的前臂灯光关闭,长曝光可达8秒,也是趋之若鹜。